パンタグラフ安全状態検出のための改善されたYOLOV3アルゴリズム
2022-08-02 09:13概要: ;パンタグラフは車両と電力系統をつなぐ重要な部品であり、車両の円滑かつ安定的な運行にはパンタグラフの安全性が欠かせません。
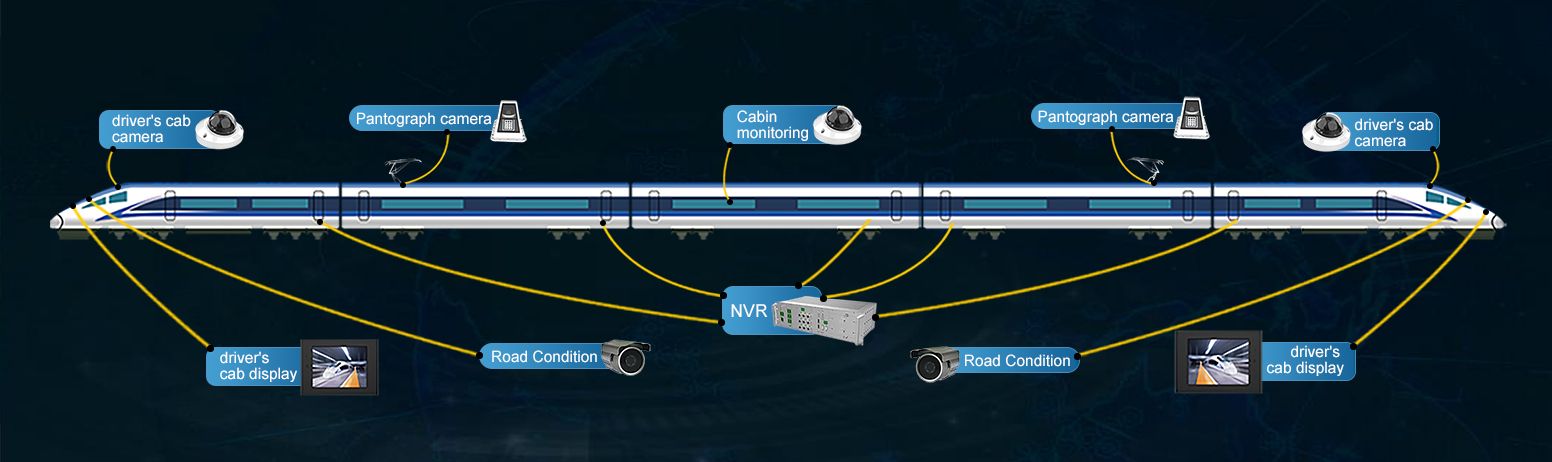
この論文では、フレームごとに、車載ビデオ監視システムによって監視されたパンタグラフのビデオ画像を分析することにより、構造を特定するために業界で広く使用されているYOLOV3ターゲット認識アルゴリズムを変更することにより、パンタグラフの安全状態をリアルタイムで監視します。パンタグラフの異常、火花、異物侵入を同時に防ぎます。実験では、ティエヌオ オンボード インテリジェント分析サーバーで 1 つのチャネルが 40fps に達することが証明されています。包括的な検出精度 地図 @0.5 は 98% を達成し、リアルタイムで比較的正確な検出結果を達成できます。
1. パンタグラフのインテリジェント監視
深層学習に基づく現在の代表的なターゲット認識アルゴリズムは、もっと早く
R-CNN
アルゴリズムなどの 2 段階アルゴリズムと、YOLOV3
アルゴリズムなどの 1 段階アルゴリズムです。ヨロ
アルゴリズムは、R-CNN
アルゴリズムと比較して事前に候補フレームを計算する必要がありません。計算量を削減し、より高速な計算速度を達成できる CNN
ネットワーク。また、YOLOV3
アルゴリズムは、前世代の ヨロ
アルゴリズムのマルチスケール検出の欠点を、認識ネットワーク部分に 3 つのブランチを持つことで改善し、小、中、大の 3 つのスケールでのターゲット認識の問題に対処できます。さらに、YOLOV3
アルゴリズムはより優れたエンジニアリング サポートを備えており、多数のアプリケーションで産業上使用されています。そのため、本稿では、
2. パンタグラフ安全状態検知アルゴリズムの構築
2.1 ターゲットの抽象化
パンタグラフの安全状態検知は、パンタグラフ構造異常検知、パンタグラフ火災検知、異物侵入検知などに分けられます。このうち、パンタグラフ構造異常は、カーボンスライド板の変形、傾き、左右船首角破断、左右の船首角破損に分けられます。右船首角度の欠落など。標準的な異常な状態を図 1B-F に示します。

図1 パンタグラフの安全状態とアルゴリズム表示基準
ターゲット識別アルゴリズムを使用するには、まず、パンタグラフの安全状態を検出する識別ターゲットを抽象化する必要があります。抽象化された識別ターゲットを図 1 に示します。正常な状態と異常な状態のパンタグラフは、一律にラベル付けされます。正常時のバウディスクとバウアングル、異常時のバウディスクとバウアングル、火花や異物などのターゲットをマーキング。次に、ラベル付けされたデータは、パンタグラフのすべての安全状態を一度に識別するためのトレーニング用の統合モデルに入れられます。
2.2 ガン ニューラル ネットワーク ベースのデータセット データ拡張
検出対象を定義した後、独自のパンタグラフ安全状態データセットを構築して、深層学習手法を使用してパンタグラフのさまざまな状態のデータセットから必要な特徴を学習する必要があります。この論文のアルゴリズム構築に必要なデータ セットは、いくつかのモデルの全天候型パンタグラフ ビデオ監視から傍受されます。環境がデータの特性に与える影響を軽減するために、照明、遮蔽、曇りの日、雨や雪、入退室などの作業条件は、データ素材の準備の過程で十分に考慮されます。データ セット内のパンタグラフの故障状態もすべて、モーター トレインの主要な走行形態でパンタグラフの故障が発生したときのビデオ監視画像から取得されます。
故障の種類によっては、実際の使用状況では発生頻度が低く、データの準備が不十分になる可能性があることを考慮してください。カテゴリ データ間の不均衡は、ターゲット認識の効果に大きな影響を与えるため、このホワイト ペーパーでは、さまざまなカテゴリのデータに対して ガン ニューラル ネットワーク ベースのデータ強化方法を採用しています。
原動力 敵対的 通信網 ガン には、生成モデルと識別モデルの 2 つのモデルが含まれています。生成モデルのタスクは、自然にリアルで元のデータに似たインスタンスを生成することです。判別モデルのタスクは、特定の例が本質的に本物に見えるか、人為的に偽造されているように見えるかを判断することです。 ;
それはゼロサムゲームと見なすことができます。ジェネレーターはディスクリミネーターをだまそうとし、ディスクリミネーターはジェネレーターにだまされないようにします。モデルは代替最適化によってトレーニングされ、両方のモデルを改善できます。これら 2 つのネットワークに基づいて、発生器 ネットワークを使用して画像を生成します。この画像は、ランダム ノイズ z を受け取り、G(z) として示されるこのノイズによって画像を生成します。ディスクリミネーターは、画像が"本物"か否か。その入力は x で、x は画像を表し、出力 D(x) は x が実際の画像である確率を表します。1 の場合は 100% 正確な画像であることを意味し、出力が 0 の場合は正確な画像とは言えません。次に、ガン ネットワークを図 2 に模式的に示します。x は実際のデータであり、正確なデータは Pdata (x) 分布に準拠しています。Z はノイズ データであり、ノイズ データはガウス分布や一様分布などの Pz (z) 分布に従います。次に、ノイズの多い z からサンプリングが行われ、G を通過した後にデータ x=G(z) が生成されます。次に、実際のデータが分類器 D に入力され、シグモイド関数が生成された情報に従い、出力が決定されます。カテゴリ。

; ; ; ; ; ; ; ; ; ; ; ; ; ; 図2 GANネットワーク原理の模式図
画像から画像への変換は、整列された画像ペアのトレーニング セットを使用して、入力画像と出力画像の間のマッピングを学習することを目標とする視覚およびグラフィックスの問題のクラスです。私たちの目標は、G:X マッピングを知ること → G(X) からの写真の分布が、敵対的損失を使用して分布 Y と区別できないようにすることです。この写像は非常に制約が少ないため、逆写像 F: Y → と結合し、巡回整合性損失を導入して F(G(X)) ≈ X (およびその逆) をプッシュします。収集方法の変換、オブジェクトのモーフィング、季節の変換、写真の強調など、ペアのトレーニング データが存在しないいくつかのタスクで定性的な結果が得られます。可能な限り、似ている、または類似しているが異なる特徴的な画像を含むシーンが選択されます。例えば、同じシーンで、カメラは汚れていて汚れていません。カメラには雨の写真と雨のない写真があります。トレーニング結果から、選択した 2 つの画像の場所があまりにも異なる場合、含まれている他の特徴が多すぎると、トレーニング効果と画像生成の品質に影響を与えることがわかります。また、選択した類似シーンから生成された画像が許容できる品質である場合、データ強化の影響を図 3 に示します。

; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 図3 データセット強化効果
さらに、この論文では、オーバーサンプリング方式を採用してデータ セットを拡張し、YOLOV3 ネットワークと組み合わせて、データ拡張手段、ランダム パケット クロッピング、ランダム フリッピング、クロマ変換、およびその他の操作を備えています。 ;
データは効果的に展開され、アルゴリズムの適応性を高め、実用化の展開段階でオブジェクトを検出するためのより高いロバスト性を提供します。ただし、左と右の船首角度を区別するために、この論文のアルゴリズムではランダムフリップと回転スイッチがオフになっています。
2.3 YOLOV3 ネットワークに基づく認識アルゴリズムの最適化
YOLOV3 のバックボーン部分は著者の ダークネット53 構造を使用しており、畳み込みニューラル ネットワーク (CNN ) と残差構造ネットワーク (レスネット ) を組み合わせることで勾配消失と勾配爆発の問題を解決し、深いネットワークのトレーニングを可能にします。さらに、アルゴリズムは事前に候補ボックスを計算する必要はありません。それでも、クラスター化、9 つのクラスターと 3 つのスケールの選択、およびこれらの 9 つのクラスターをこれら 3 つのスケールに均等に分散することによってアプリオリに ボンディングボックス を取得します。ただし、スケールの問題により、ヨロ アルゴリズムの精度は、特に小さなターゲットの検出において、ターゲット認識アルゴリズムの中で最高ではありません。YOLOV3 アルゴリズムは、高速性を維持しながら検出精度を向上させるために、YOLOV3 のバックボーンが変更されています。具体的な方法はdarknet53の残余ユニットにチャンネルアテンションSEモジュールを追加することです。変換前後の残差ネットワーク ユニットの構造を図 4 に示します。

; ; ; ; ; ; ; ; ;図4 改変前後のSEモジュールの残存構造
SE モジュールは、スクイーズ -と -励起 ネットワーク の略である SEネット に由来し、ImageNet 2017 分類コンペティション チャンピオンシップを獲得し、その有効性と実装の容易さで認められており、既存のネットワーク モデル フレームワークに簡単にロードできます。SEネット は主に、チャネル間の相関関係は、チャネルの注意を除外します。これにより、計算がわずかに増加しますが、効果はより良くなります。ダークネット のバックボーン部分には、合計 23 の残りのモジュール ユニットがあります。この論文では、元の 解像度 ユニットは、いくつかの残りのユニットの SE -解像度 ユニットに変換されます。中小規模のターゲットに対するYOLOV3ネットワークの検出能力を向上させるために、変更した残りのユニットもこれら2つのブランチに配置されています。SE モジュールによって変換された YOLOV3 の全体的なネットワーク アーキテクチャを図 5 に示します。

図 5 YOLOV3 ネットワーク構造図
認識ネットワークの部分では、YOLOV3 はアップサンプリングとクロスレイヤー カスケードによってより強力になり、3 つの異なるスケールの検出結果を出力します。損失関数の設計部分では、ターゲット信頼度、カテゴリ、および位置がクロスエントロピー損失関数によって一度に学習され、損失関数は式 1 で示されます。

3. 実験結果の分析
3.1 Tienuoのインテリジェント分析サーバーの紹介
既存の車載ビデオ監視システムのほとんどは、ビデオ監視とストレージ機能のみを備えており、インテリジェントなオンライン分析機能を備えていません。このホワイト ペーパーのハードウェアは、図 6 に示すように、山東省 ティエヌオ 知的 コ . が開発したオンボード インテリジェント分析サーバーの助けを借りて実装されています。ホストには、ファーウェイ が自社開発した ダ ヴィンチ アーキテクチャ AI スマート チップ アトラス 3000 が搭載されています。ほとんどのシナリオで革新的な分析アプリケーションに対応し、最大 16 チャンネルの 720p ビデオのデコードとインテリジェントな分析タスクを実現します。また、テスト結果を運転室または整備士にリアルタイムで送信できるため、テスト結果を手動で確認し、対応する安全対策を講じることができます。このホワイト ペーパーでは、このハードウェアを使用して、単一のカメラ ビデオ チャネルを実行する場合に 60fps の計算速度を達成します。複数のビデオの 4 チャネルの同時分析により、25fps の計算速度も保証され、マルチチャネルビデオのリアルタイムインテリジェント分析の要求を実現できます。

図 6 インテリジェント分析サーバーとインターフェイスの図
3.2 パンタグラフ状態判別結果
パンタグラフの安全状態を検出するために、この論文では独自のパンタグラフ安全状態データセットを構築します。このデータセットには、さまざまな作業条件下での正常な状態のパンタグラフと異常な状態のパンタグラフ監視画像を含む、さまざまな形態のパンタグラフの 2388 枚の写真が含まれています。ラベル付けされたデータセットは、ダークネット フレームワークを使用してトレーニングされます。トレーニング プロセスを図 7 に示します。図から、12000 回の反復後もトレーニング損失が安定しており、モデルが局所最適に陥る可能性があることがわかります。学習率は 20000 回の反復で 1 回調整され、損失は 0.1 未満に低下します。20,000 回の反復以降の計算精度の向上は重要ではなく、対応する 地図 プロットは、モデルの一般化能力がわずかに低下していることを示しています。トレーニング ロスと 地図 を考慮するには、

図4 パンタグラフ安全状態判別訓練の流れ
トレーニング済みのモデルをインテリジェントな分析ホストにデプロイするには、トレーニング済みのモデルを ファーウェイ ダ ヴィンチ アーキテクチャでサポートされている オム 形式に変換する必要があります。変換プロセスの精度はわずかに低下しますが、すべて許容範囲内です。

4. まとめと展望
本稿では、YOLOV3 アルゴリズムを使用して、パンタグラフの構造異常、火花、異物侵入などの安全状態をリアルタイムのビデオ監視を通じて検出し、検出速度を考慮しながら、検出の精度が実際の要件を満たすことを保証します。時間分析。これは、パンタグラフの安全検査でオンボードのインテリジェント分析システムを使用するための新しいアイデアを提供します。